Saturday, July 24, 2021
Friday, July 16, 2021
Artificial Intelligent Robot Raspberry pi and Arduino-part3
Artificial Intelligent Robot Raspberry pi and Arduino-part3
Monday, July 12, 2021
Artificial Intelligent robot raspberry pi and Arduino-Part1
Artificial Intelligent robot raspberry pi and Arduino-Part1
In this project we are building AI robot based on the raspberry pi 3 B and two Arduino Mega microcontrollers and one PC (laptop) ,many other electronic component used i.e. raspberry camera model, Ultra Sonic HC-SR04 Sensor, IR sensor, L298 Dual Motor Driver, DC motors with built in encoders ,servo motor...etc.

I2C protocol and I2C bus used to connect
the raspberry pi 3 B and two Arduino Mega microcontrollers, raspberry pi 3 B
and one of the Arduino Mega acting as master and the 2nd Arduino
Mega acting as slave and getting the control signals from the masters on I2C
bus.
From the Artificial Intelligent side we have used computer vision (face detection and face recognition) and voice
recognition also we have used Artificial Intelligent chat bot. From the
development / programing side we have used python, Arduino C languages and MIT
app inventor to develop the applications used in this project.

Following is the list of applications
developed and main features:
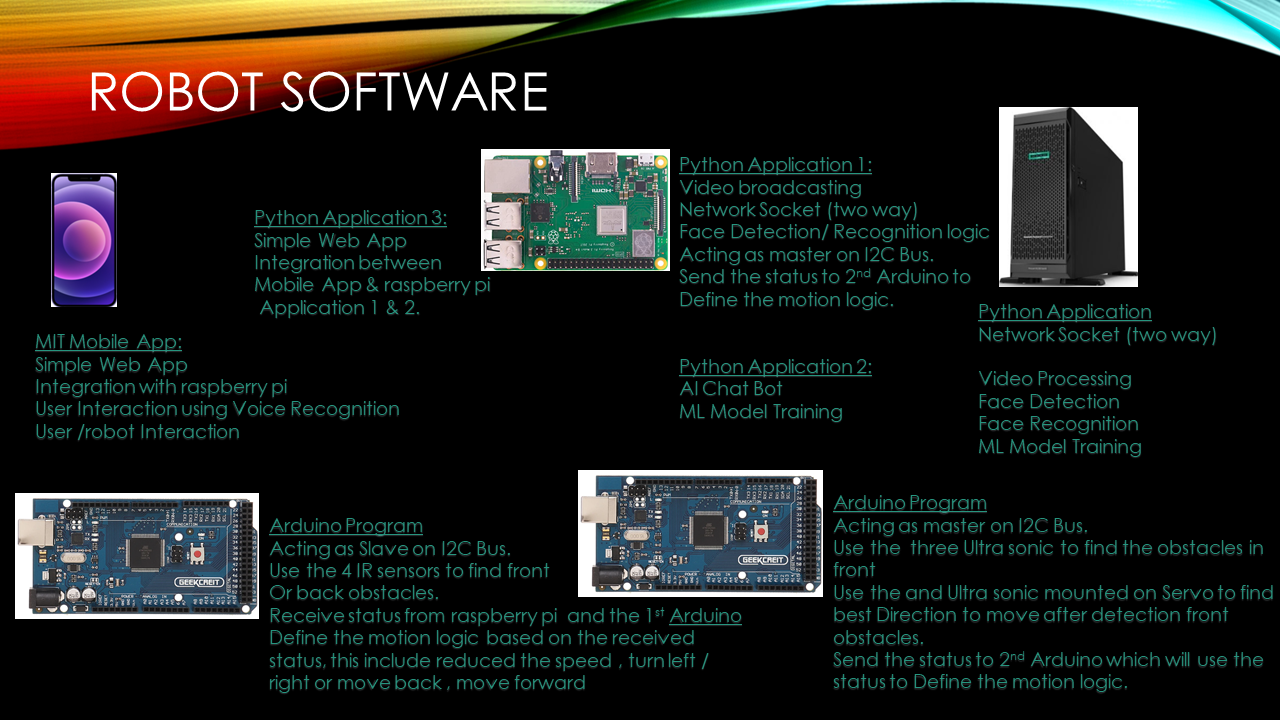
PC (laptop) Server
Python
Application
- Network Socket (two way)
- Video Processing
- Face Detection
- Face Recognition
- ML Model Training
Raspberry pi 3 B
Python Application 1:
- Video broadcasting
- Network Socket (two way)
- Face Detection/ Recognition logic
- Acting as master on I2C Bus.
- Send the status to 2nd Arduino to
- Define the motion logic.
Python Application 2:
- AI Chat Bot
- ML Model Training
Python Application 3:
- Simple Web App used in Integration between Mobile App & raspberry pi Application 1 & 2.
Arduino Mega1 Arduino Program
- Acting as master on I2C Bus.
- Use the three Ultra sonic to find the obstacles in front
- Use the and Ultra sonic mounted on Servo to find best Direction to move after detection front obstacles.
- Send the status to 2nd Arduino which will use the status to Define the motion logic.
Arduino Mega2 Arduino Program
- Acting as Slave on I2C Bus.
- Use the 4 IR sensors to find front
- Or back obstacles.
- Receive status from raspberry pi and the 1st Arduino
- Define the motion logic based on the received status, this include reduced the speed , turn left / right or move back , move forward
Mobile
MIT Mobile App:
- Simple Web App
- Integration with raspberry pi
- User Interaction using Voice Recognition
- User /robot Interaction
Saturday, July 10, 2021
Artificial Intelligent robot raspberry pi and Arduino-Part2
Artificial Intelligent robot raspberry pi and Arduino